






































































































































![С миру по нитке [13.05.2025]](http://tesera.ru/images/items/2478636,15/125x125xpa/photo.png)

































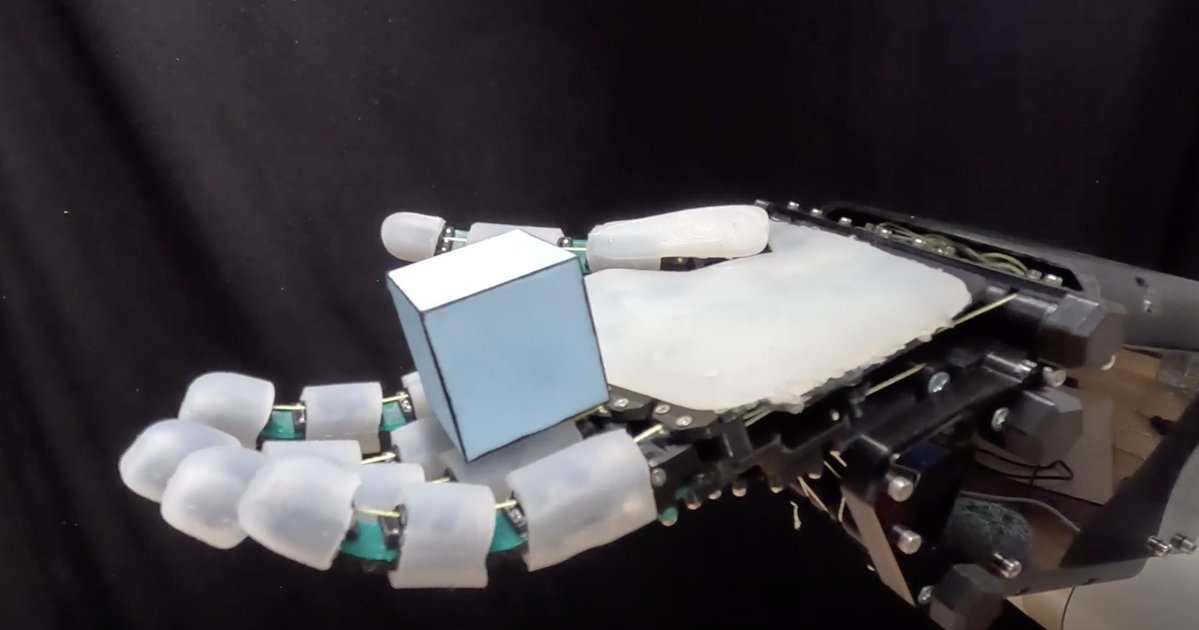
«Самоорганизующийся» захват: роборука хватает предметы как человек (видео)
Человеку достаточно протянуть руку, чтобы схватить бутылку, даже не зная ее точного положения. Для робота эта задача требует куда более сложной подготовки. Роботам, в отличие от людей, обычно нужна точная информация о положении предмета и окружающем его пространстве для расчета траектории движения. Однако исследователи из Лозаннской высшей политехнической школы (EPFL) предложили новый подход, вдохновленный естественными свойствами человеческого тела, и разработали роботизированную руку, способную к так называемому «самоорганизующемуся» захвату. Разработка получила название ADAPT — Adaptive Dexterous Anthropomorphic Programmable sTiffness. Это роботизированная кисть, в которой ключевую роль играют мягкие материалы, в частности, обернутый вокруг суставов и пальцев силикон, а также встроенные пружины. Такая конструкция позволяет руке легко изгибаться и адаптироваться к форме предмета без сложных компьютерных расчетов. В итоге робот, даже не имея точной информации о захватываемом объекте, может подстраиваться под его форму и положение — точно так же, как это делает человеческая рука. Как отмечает Кай Юнге из лаборатории CREATE при Школе инженерии EPFL, именно «механический интеллект», распределенный по различным частям конструкции, позволяет роботу действовать гибко и эффективно. Вместо того чтобы полагаться исключительно на центральное управление, как это происходит у традиционных роботов, ADAPT использует «интеллект» кожи, мышц и суставов, встроенный в саму механику устройства.
Человеку достаточно протянуть руку, чтобы схватить бутылку, даже не зная ее точного положения. Для робота эта задача требует куда более сложной подготовки.
Роботам, в отличие от людей, обычно нужна точная информация о положении предмета и окружающем его пространстве для расчета траектории движения. Однако исследователи из Лозаннской высшей политехнической школы (EPFL) предложили новый подход, вдохновленный естественными свойствами человеческого тела, и разработали роботизированную руку, способную к так называемому «самоорганизующемуся» захвату.
Разработка получила название ADAPT — Adaptive Dexterous Anthropomorphic Programmable sTiffness. Это роботизированная кисть, в которой ключевую роль играют мягкие материалы, в частности, обернутый вокруг суставов и пальцев силикон, а также встроенные пружины. Такая конструкция позволяет руке легко изгибаться и адаптироваться к форме предмета без сложных компьютерных расчетов. В итоге робот, даже не имея точной информации о захватываемом объекте, может подстраиваться под его форму и положение — точно так же, как это делает человеческая рука.
Как отмечает Кай Юнге из лаборатории CREATE при Школе инженерии EPFL, именно «механический интеллект», распределенный по различным частям конструкции, позволяет роботу действовать гибко и эффективно. Вместо того чтобы полагаться исключительно на центральное управление, как это происходит у традиционных роботов, ADAPT использует «интеллект» кожи, мышц и суставов, встроенный в саму механику устройства.


