

































































































Revolução multimodal: robô japonês supera desafios e inaugura nova era na locomoção robótica
Pesquisadores japoneses desenvolveram um revolucionário robô quadrúpede capaz de se movimentar com agilidade tanto no ar quanto em terra. Batizado de SPIDAR (Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot), o dispositivo criado por uma equipe da Universidade de Tóquio representa um avanço significativo na robótica multimodal. A inovação central do SPIDAR está em seu […]
Pesquisadores japoneses desenvolveram um revolucionário robô quadrúpede capaz de se movimentar com agilidade tanto no ar quanto em terra. Batizado de SPIDAR (Sensing, Processing, and Intelligent Dynamics for Aerial-ground Robot), o dispositivo criado por uma equipe da Universidade de Tóquio representa um avanço significativo na robótica multimodal.
A inovação central do SPIDAR está em seu sistema único de controle de empuxo vetorial. Cada uma das quatro pernas do robô está equipada com rotores vetorizáveis, que permitem alternar entre diferentes modos de locomoção com precisão impressionante. “Os resultados experimentais do voo com movimento complexo das articulações e o movimento repetível de rastejamento são explicados, demonstrando a viabilidade dos métodos de controle de empuxo propostos para diferentes modos de locomoção”, destacam os pesquisadores no resumo do estudo publicado no arXiv.
Um salto na locomoção robótica
Na última década, robôs com capacidade de andar e voar avançaram consideravelmente. Entre esses projetos, os equipados com pernas se destacam pela habilidade de manipular objetos e navegar em terrenos irregulares. Modelos com múltiplas pernas, como o SPIDAR, oferecem maior estabilidade e adaptabilidade.
O novo robô utiliza rotores vetorizáveis integrados em cada segmento das pernas, permitindo tanto caminhada quanto voo. Embora tentativas anteriores tenham alcançado voos básicos e caminhada estática, o SPIDAR supera limitações relacionadas a movimentos articulares complexos e eficiência energética.
Um desafio crucial enfrentado pelos pesquisadores foi a interferência aerodinâmica entre rotores alinhados verticalmente, que compromete a estabilidade do voo e a capacidade de manipulação. Para contornar esse problema, a equipe desenvolveu uma técnica inovadora de controle baseada em otimização, estabelecendo limites específicos para a vetorização dos rotores.
Equilíbrio e eficiência em movimentos híbridos
Devido ao design leve do SPIDAR, seus servomotores não conseguem gerar torque suficiente por conta própria. A solução encontrada pelos pesquisadores foi desenvolver um movimento de rastejamento mais eficiente, no qual as pernas se movem simultaneamente sem elevar o torso, complementado por um sistema híbrido de controle de empuxo e torque para caminhada.
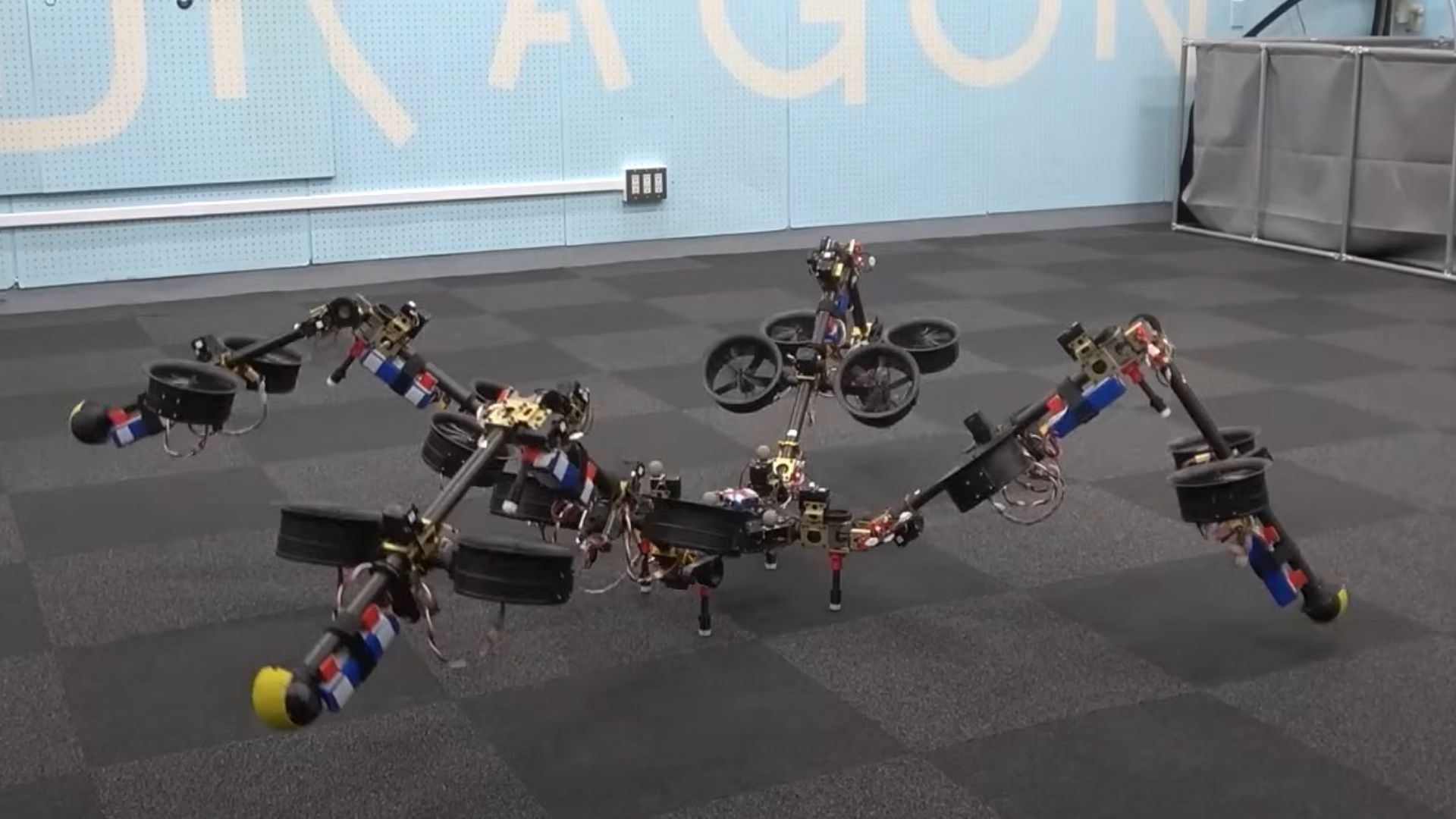
O robô apresenta construção simétrica com quatro pernas, cada uma composta por dois segmentos unidos por articulações rotativas. Essa configuração permite movimentação em qualquer direção, enquanto cada rotor pode inclinar-se livremente para modificar a força e direção do fluxo de ar durante voo ou rastejamento.
Para evitar giros indesejados, o dispositivo utiliza dois propulsores contra-rotativos em cada perna, além de dois motores para controle de inclinação. O sistema de navegação baseia-se no centro de gravidade do robô e emprega um controlador PID para ajustar precisamente o ângulo e a força dos rotores, mantendo posição e orientação estáveis.
Resultados promissores e próximos passos
Os testes realizados mostraram que o SPIDAR consegue executar rastejamento e voo de forma estável. Particularmente os modelos com três pernas demonstraram excelente controle durante avaliações de voo em diversas condições. Nos testes de rastejamento, o robô apresentou movimento preciso para frente, embora tenha sido identificada alguma instabilidade devido à rápida elevação das pernas e limitações dos servomotores.
Para solucionar a instabilidade observada durante o rastejamento, a equipe planeja substituir o controle simples das articulações por um sistema mais avançado baseado em empuxo e dinâmica articular. Futuramente, o SPIDAR será testado em terrenos irregulares, como escadas, e sua capacidade de agarrar objetos com o corpo inteiro será explorada para demonstrar todo seu potencial.